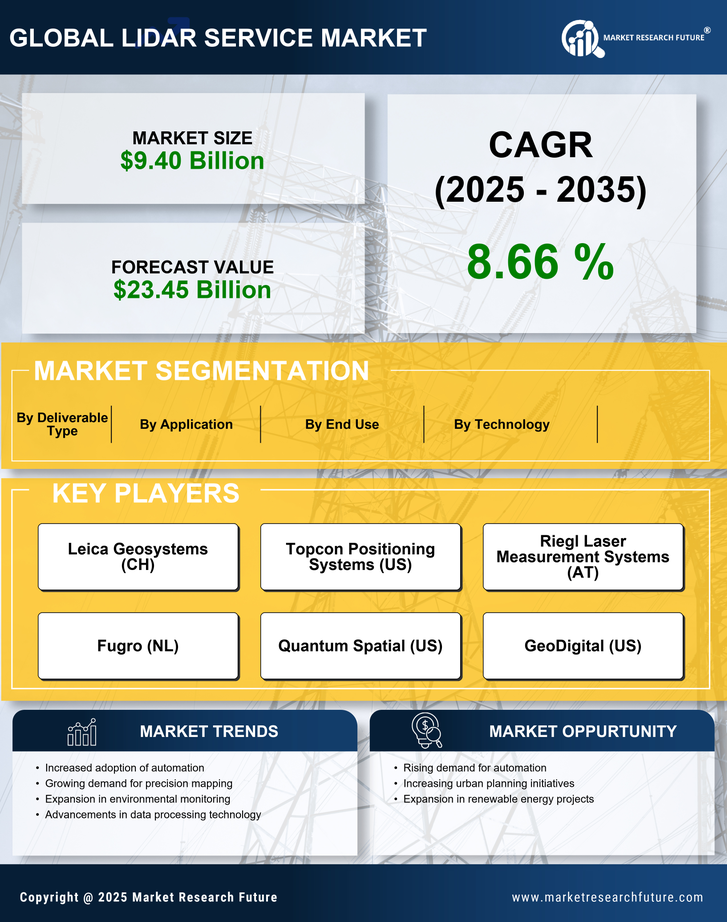


LiDAR 서비스 시장 세분화
-
LiDAR 서비스 시장 응용 분야별 (USD 억, 2019-2032)
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
-
LiDAR 서비스 시장 기술별 (USD 억, 2019-2032)
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
-
LiDAR 서비스 시장 최종 사용처별 (USD 억, 2019-2032)
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
-
LiDAR 서비스 시장 제공 유형별 (USD 억, 2019-2032)
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
-
LiDAR 서비스 시장 지역별 (USD 억, 2019-2032)
- 북미
- 유럽
- 남미
- 아시아 태평양
- 중동 및 아프리카
LiDAR 서비스 시장 지역 전망 (USD 억, 2019-2032)
- 북미 전망 (USD 억, 2019-2032)
- 북미 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 북미 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 북미 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 북미 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 북미 LiDAR 서비스 시장 지역별
- 미국
- 캐나다
- 미국 전망 (USD 억, 2019-2032)
- 미국 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 미국 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 미국 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 미국 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 캐나다 전망 (USD 억, 2019-2032)
- 캐나다 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 캐나다 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 캐나다 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 캐나다 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 유럽 전망 (USD 억, 2019-2032)
- 유럽 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 유럽 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 유럽 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 유럽 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 유럽 LiDAR 서비스 시장 지역별
- 독일
- 영국
- 프랑스
- 러시아
- 이탈리아
- 스페인
- 유럽 기타 지역
- 독일 전망 (USD 억, 2019-2032)
- 독일 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 독일 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 독일 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 독일 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 영국 전망 (USD 억, 2019-2032)
- 영국 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 영국 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 영국 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 영국 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 프랑스 전망 (USD 억, 2019-2032)
- 프랑스 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 프랑스 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 프랑스 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 프랑스 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 러시아 전망 (USD 억, 2019-2032)
- 러시아 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 러시아 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 러시아 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 러시아 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 이탈리아 전망 (USD 억, 2019-2032)
- 이탈리아 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 이탈리아 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 이탈리아 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 이탈리아 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 스페인 전망 (USD 억, 2019-2032)
- 스페인 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 스페인 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 스페인 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 스페인 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 유럽 기타 지역 전망 (USD 억, 2019-2032)
- 유럽 기타 지역 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 유럽 기타 지역 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 유럽 기타 지역 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 유럽 기타 지역 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 아시아 태평양 전망 (USD 억, 2019-2032)
- 아시아 태평양 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 아시아 태평양 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 아시아 태평양 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 아시아 태평양 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 아시아 태평양 LiDAR 서비스 시장 지역별
- 중국
- 인도
- 일본
- 한국
- 말레이시아
- 태국
- 인도네시아
- 아시아 태평양 기타 지역
- 중국 전망 (USD 억, 2019-2032)
- 중국 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 중국 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 중국 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 중국 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 인도 전망 (USD 억, 2019-2032)
- 인도 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 인도 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 인도 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 인도 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 일본 전망 (USD 억, 2019-2032)
- 일본 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 일본 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 일본 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 일본 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 한국 전망 (USD 억, 2019-2032)
- 한국 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 한국 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 한국 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 한국 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 말레이시아 전망 (USD 억, 2019-2032)
- 말레이시아 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 말레이시아 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 말레이시아 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 말레이시아 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 태국 전망 (USD 억, 2019-2032)
- 태국 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 태국 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 태국 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 태국 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 인도네시아 전망 (USD 억, 2019-2032)
- 인도네시아 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 인도네시아 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 인도네시아 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 인도네시아 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 아시아 태평양 기타 지역 전망 (USD 억, 2019-2032)
- 아시아 태평양 기타 지역 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 아시아 태평양 기타 지역 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 아시아 태평양 기타 지역 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 아시아 태평양 기타 지역 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 남미 전망 (USD 억, 2019-2032)
- 남미 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 남미 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 남미 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 남미 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 남미 LiDAR 서비스 시장 지역별
- 브라질
- 멕시코
- 아르헨티나
- 남미 기타 지역
- 브라질 전망 (USD 억, 2019-2032)
- 브라질 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 브라질 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 브라질 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 브라질 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 멕시코 전망 (USD 억, 2019-2032)
- 멕시코 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 멕시코 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 멕시코 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 멕시코 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 아르헨티나 전망 (USD 억, 2019-2032)
- 아르헨티나 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 아르헨티나 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 아르헨티나 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 아르헨티나 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 남미 기타 지역 전망 (USD 억, 2019-2032)
- 남미 기타 지역 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 남미 기타 지역 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 남미 기타 지역 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 남미 기타 지역 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 중동 및 아프리카 전망 (USD 억, 2019-2032)
- 중동 및 아프리카 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 중동 및 아프리카 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 중동 및 아프리카 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 중동 및 아프리카 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 중동 및 아프리카 LiDAR 서비스 시장 지역별
- GCC 국가
- 남아프리카
- 중동 및 아프리카 기타 지역
- GCC 국가 전망 (USD 억, 2019-2032)
- GCC 국가 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- GCC 국가 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- GCC 국가 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- GCC 국가 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 남아프리카 전망 (USD 억, 2019-2032)
- 남아프리카 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 남아프리카 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 남아프리카 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 남아프리카 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 중동 및 아프리카 기타 지역 전망 (USD 억, 2019-2032)
- 중동 및 아프리카 기타 지역 LiDAR 서비스 시장 응용 분야별
- 환경 모니터링
- 건설 및 광업
- 운송 및 물류
- 해안 및 해양 응용
- 고고학
- 중동 및 아프리카 기타 지역 LiDAR 서비스 시장 기술별
- 지상 LiDAR
- 항공 LiDAR
- 모바일 LiDAR
- 단거리 LiDAR
- 장거리 LiDAR
- 중동 및 아프리카 기타 지역 LiDAR 서비스 시장 최종 사용처별
- 정부 및 공공 부문
- 상업 부문
- 연구 및 개발
- 유틸리티 회사
- 중동 및 아프리카 기타 지역 LiDAR 서비스 시장 제공 유형별
- 포인트 클라우드 데이터
- 3D 모델
- 지리공간 분석
- 디지털 고도 모델
- 중동 및 아프리카 LiDAR 서비스 시장 응용 분야별
- 남미 LiDAR 서비스 시장 응용 분야별
- 아시아 태평양 LiDAR 서비스 시장 응용 분야별
- 유럽 LiDAR 서비스 시장 응용 분야별
- 북미 LiDAR 서비스 시장 응용 분야별








